Seminar of Professor Youn Sik Park
At LMSSC, Cnam, Paris, June 28th 2013, 11 a.m.
Youn Sik Park
Professor, Center for Noise and Vibration Control (NoViC), Department of Mechanical Engineering,
Korea Advanced Institute of Science and Technology (KAIST), Daejeon, Korea
- Biped robot walking:
Stability and versatility of biped robot system are numerically studied. This research suggests an idea to widen basin of attractions in limit cycle gait and to raise its versatility. Versatility is an ability to make different gaits without losing its stability. - Active window system:
Active window idea is tried to reduce exterior noise and can realize a quieter sound pressure level inside room. Active noise control devices which positioned on window frame are used. This study covers both numerical and experimental work. - Tape hinge design for satellite solar panel deployment:
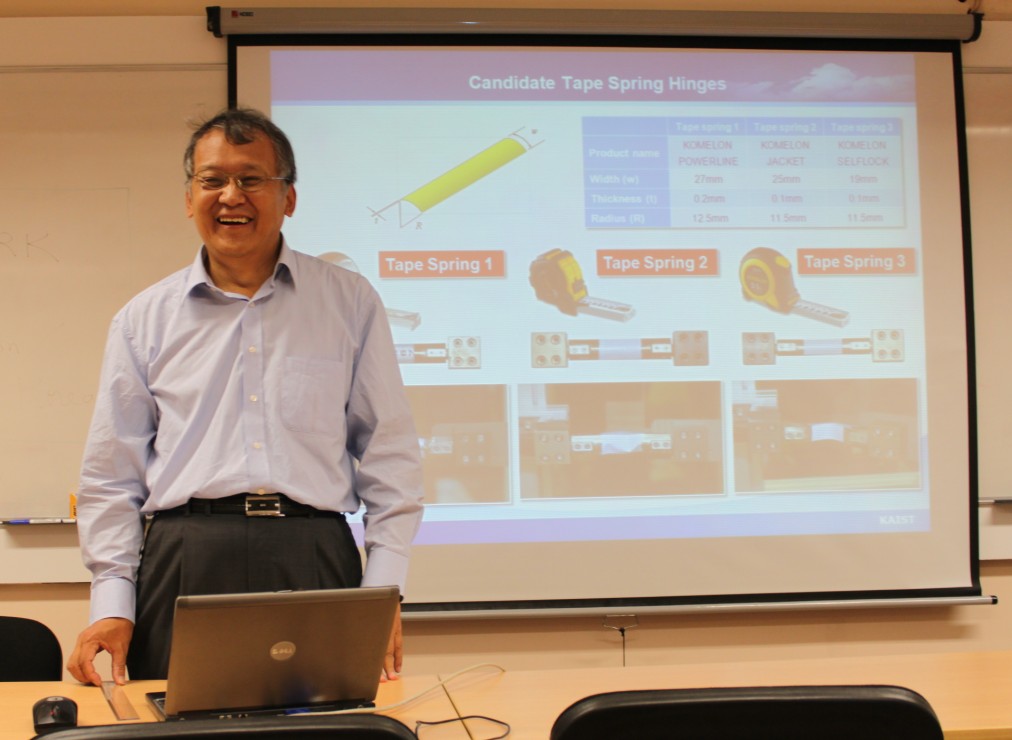
For small size satellites, tape hinges are commonly used when deploying solar panels in space. Since tape hinge has highly nonlinear properties it is very difficult proper tape hinges.
This work introduces an example for highly nonlinear hinge design procedures.